





















- 節能
- 環保
- 安全
- 有效

- 1、江淼產品采用自主研發技術,更好地解決傳統RO機廢水問題
- 2、采用10寸濾芯,在正常使用周期內不會堵塞
- 3、智能化控制,停水及水壓低時保護RO機元器件

- 1、過濾精度高、使用壽命長、適合國內水質,經濟、環保
- 2、有效去除水中的雜志和農藥殘留、重金屬離子等有害物質
- 3、造出的水口感甘甜,而且富含礦物質,更加健康
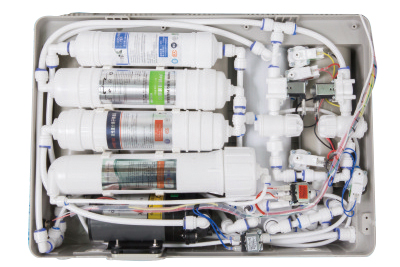
- 1、所有涉水部件均使用食品級材料,有效杜絕有害成分
- 2、使用前置濾芯過濾精度高,有效保護RO膜,性能穩定,延長使用壽命
- 3、打破傳統水機安裝流程,安裝簡單、方便。更換、清洗濾芯更省時
- 1、使用國內大功率穩壓瓣膜泵,在各個地方均可穩定使用
- 2、采用臺灣工藝快捷式接頭,鏈接緊密,杜絕漏水
- 3、匯淼產品實用,各種環境均可安裝




About關于我們

環保 節能 珍惜資源
掌握未來,創新突破,超越更高的目標
安徽江淼凈水設備有限公司是一家集研發、制造、市場營銷為一體的民營科技企業,公司致力于各類家用和商用凈水機、直飲機、RO反滲透凈水機、超濾凈水機及其他大型水處理設備等產品和RO反滲透廢水循環再滲透系統解決方案的研發及運營推廣。公司坐落于享有“皖東明珠”之稱的安徽省天長市,南接六朝古都南京、東臨歷史名城揚州,205國道貫穿南北,312省道橫貫東西,寧連、宿揚高速貫穿境內,交通十分便捷。這里作為皖江城市帶承接產業轉移示范區,具有得良好的地理環境和區位產業集群優勢,有著良好的投資與發展環境。技術和品牌是匯淼公司發展壯大之基礎,多年來,公司一直致力于技術研發和品牌建設,以原創性技術為基礎,自主研發產品為核心的戰略目標;以技術帶動行業發展,以品牌提升產品附加值為發展思路;不斷開發新型凈水處理產品,優化升級傳統產品...
公司新聞more+

- 凈水器上半年高位增長 電商優勢漸顯
- 據相關數據顯示:2015年6月凈水器行業總產量107萬臺,同比增長 20.9%;總銷量108萬臺,同比去年增長17.3%。其中內銷出貨94萬...
- 2017-11我公司參加******水展...
- 2017-11我愛發明欄目組編導姜石山到公司采訪盛總...
- 2017-11我公司參加上海******水展山東記者現場采訪盛...
- 2017-11興義雙乳峰匯淼招商會...
- 2017-06太陽雨兩位領導了解我公司產品...
安裝保養more+
- 凈水器濾芯拆卸步驟與清洗方法
- 自帶過濾器的家用凈水器具有一定殺菌作用,但在家里長期使用過后,凈水器濾芯會被長時間積累的細菌雜質等污染。因此,帶有過濾器的凈水設備也要定期進...
- 2017-11凈水器濾芯拆卸步驟與清洗方法...
- 2017-11凈水器濾芯要經常換真麻煩,有沒有不用更換...
- 2017-11凈水器故障大全,快來看看吧!...
- 2016-08消費者在選購、安裝凈水機時四大問題要注意...
- 2016-06想知道家用凈水器怎樣保養嗎 秘訣在這里...